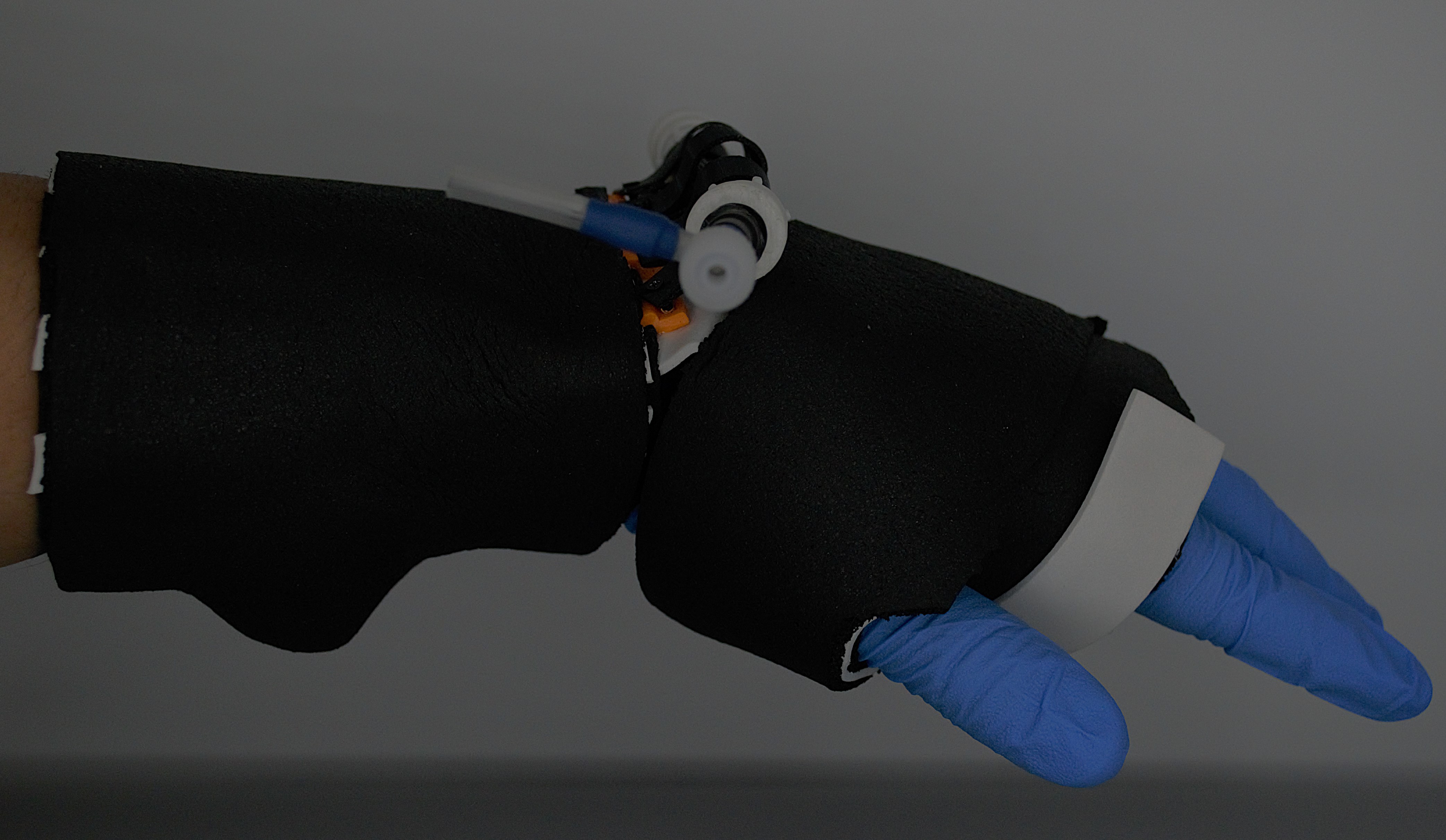
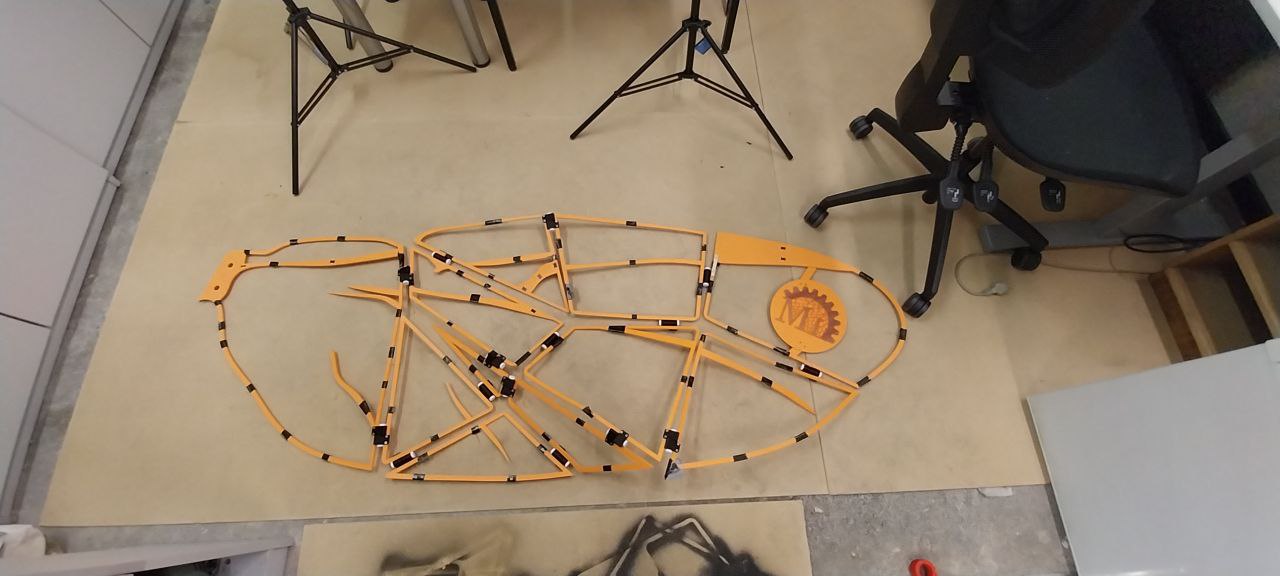
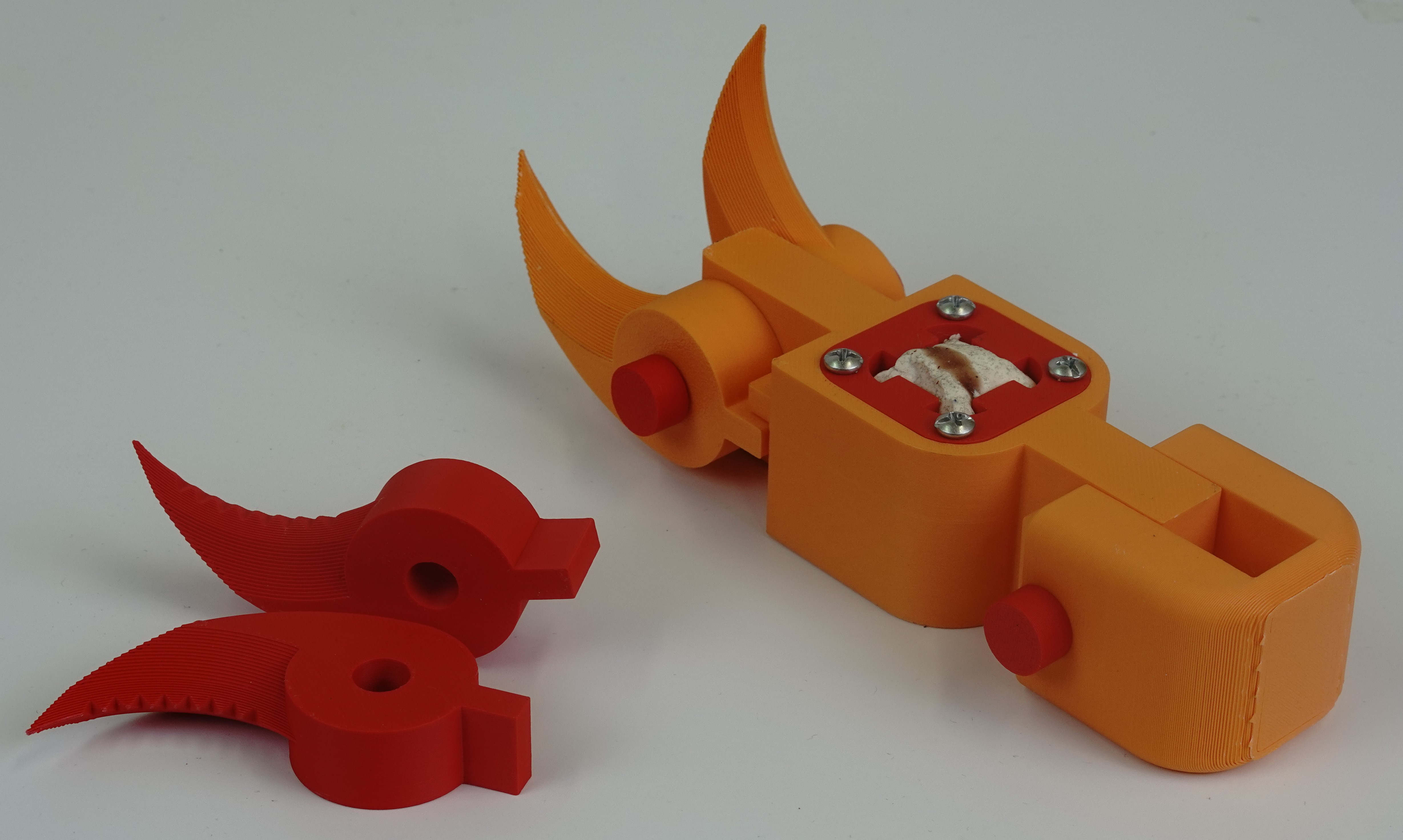
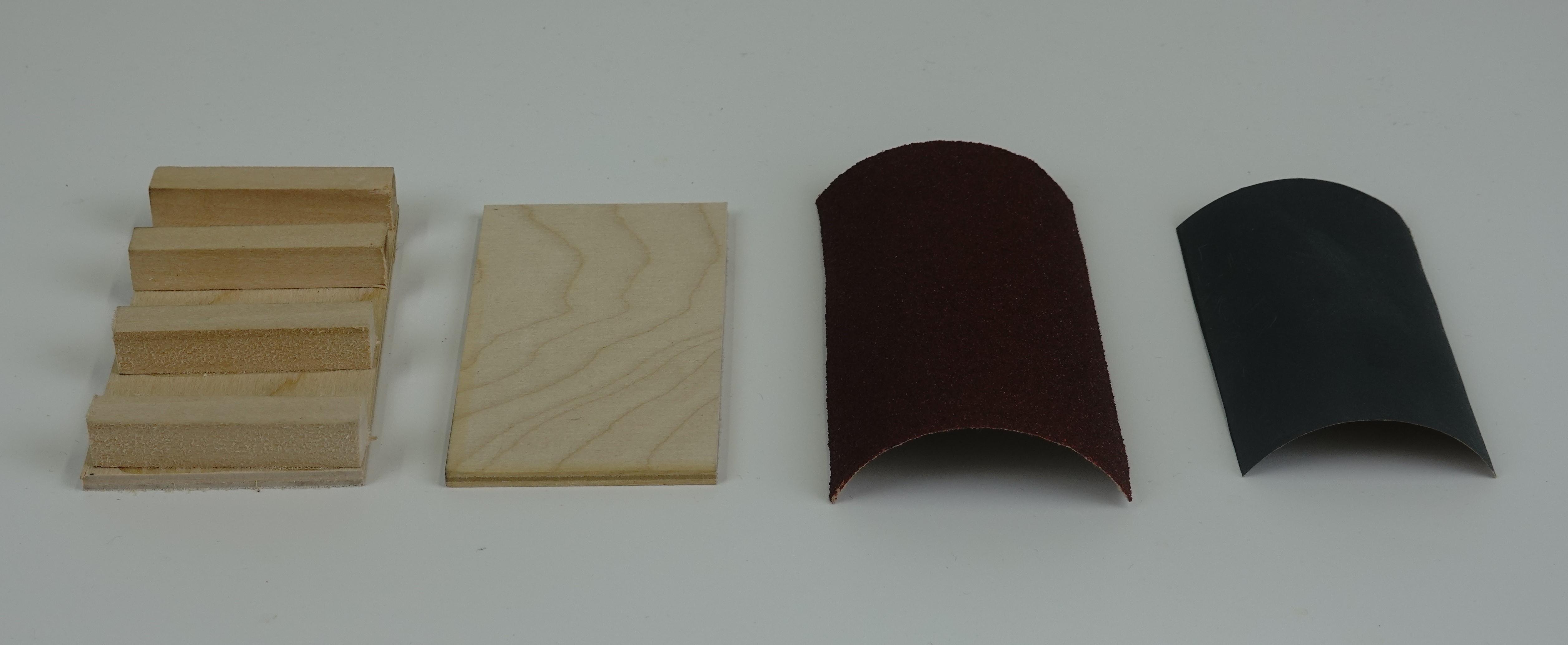
The 2-meter foldable rove beetle wing was engineered, drawing inspiration from the insect's intricate folding patterns and double-layer membrane hinges. Its deployable structure was designed by adapting Origami principles to achieve folding and unfolding. The hypothesized pressure-controlled actuation mechanics were investigated and tested using a scaled pneumatic system. This system, employing a McKibben Artificial Muscle, allowed for the controlled deployment and retraction of the structure.T he wing was fabricated primarily using PLA (Polylactic Acid), with FDM 3D printing employed for the main structural components to ensure complex, customizable geometry. Wood was incorporated into the design as a reinforcement material to increase overall stiffness while maintaining a manageable weight for the 2-meter span. These insights were then applied to the development of a dynamic, adjustable structure (a placeholder concept for future deployable systems). The design features completely replaceable and modular components, enabling easy assembly and repair. Testing confirmed the feasibility of using pressure control to adjust the wing's stiffness and stability, demonstrating a potential mechanism for adaptive load-bearing structures. [Gabriel B. G. Falcão, Sepehr Eraghi, Dr Hamed Rajabi]